
Robot intel·ligent quàdrupeu


Introducció
Actualització de l'algoritme: moviments més àgils i àgils
Aconseguir una major capacitat de superació d'obstacles i moviments d'alta dificultat
1. Pot saltar trinxeres, saltar alt, fer tombarelles frontals i altres moviments d'alta dificultat
2. Pujar esglaons de 15 cm, gairebé l'alçada màxima assolible per robots quadrúpedes de la mateixa mida
3. Suport per a salts cap enrere, girs corporals, salts giratoris, salutacions, moonwalk, rollover i aixecament, etc.
Evolució escalable
Disseny modular per a una expansió il·limitada
La càrrega útil per caminar d'1,4,5 kg amplia considerablement l'espai d'expansió
2. Proporcionar interfícies avançades de desenvolupament de capacitats de percepció (SDK i API)
3. Amb estructura modular oberta i interfícies, compatible amb la instal·lació de mòduls RTK, 5G, amfitrions d'IA, processadors de vora i diversos sensors
4. Equipat amb lidar i càmera de profunditat, que permeten el desenvolupament en profunditat de capacitats de percepció avançades com ara navegació autònoma, aturada i evitació automàtica d'obstacles, posicionament visual i reconstrucció de l'entorn
Augment del 50% del parell articular: potència potent per als moviments
Els mòduls d'accionament de juntes d'alt parell de desenvolupament propi presenten una densitat de parell ultra alta, un ample de banda de resposta i una eficiència de transmissió inversa.
Increment de l'1,40% en la càrrega útil màxima per caminar
2. Resistència de moviment gairebé duplicada, amb un temps de moviment continu de 90 minuts i un abast de 5 km
Triple augment de la potència de càlcul del sistema de control de grau industrial
Adopteu IMU de grau industrial per a una millora completa de l'estabilitat i la potència de càlcul
1. Primera introducció d'un sistema de control en temps real de grau industrial amb un nucli profundament optimitzat
2. La potència de càlcul total va augmentar gairebé 3 vegades
3. Amb alta comunicació en temps real i una freqüència de control de fins a 1 kHz
Sistema d'interacció home-màquina completament actualitzat
1. Rendiment de transmissió d'imatges en temps real a primera vista millorat amb latència reduïda
2. S'ha afegit una interacció amb llenguatge lluminós, que permet als usuaris obtenir diversos estats del robot quadrúpede en temps real.
3. Moviments assistits per la percepció més segurs i diversos
4. Suport per aturar, reconèixer i seguir obstacles davanters i posteriors, evitar obstacles davanters, navegar autònomament i altres funcions
Paràmetres tècnics
| 1. Plataforma de maquinari | |
| Mida de peu | Longitud 610 mm ± 10 mm, Amplada 370 mm ± 10 mm, Alçada 445 mm ± 10 mm |
| Mida de la mentida | Longitud 680 mm ± 10 mm, Amplada 370 mm ± 10 mm, Alçada 175 mm ± 10 mm |
| Pes total (amb bateria) | aprox. 12,2 kg |
| Resistència sense càrrega | 1,5 h ~ 2 h, abast: 4 km |
| El robot adopta un algoritme de control de força complet per a l'equilibri. Pot realitzar una detecció de força 3D sense ceguesa a 360° al peu sense sensors de pressió de la sola, amb un baix desgast del peu i un baix cost de manteniment. | |
| Material | Cuixes: aliatge d'alumini; tiges: plàstic compost d'alta resistència; s Oles: cautxú absorbent d'impactes, antilliscant i resistent al desgast. |
| bateria | Equipat amb bateria de liti endollable; capacitat de la bateria ≥4400 mAh, energia nominal ≥126,7 Wh; temps de càrrega: 40 min ~ 1 h. |
| DOF | Graus de llibertat totals (DOF): 12; DOF per cama: 3. |
| mòdul articular | Adopta un mòdul d'unió integrat amb un diàmetre exterior ≤76 mm; compost per un motor d'alta densitat de parell, un reductor d'alta precisió, un codificador absolut i un sensor de temperatura. |
| Sortida d'alimentació integrada (5V/12V/24V) i interfícies de comunicació (Ethernet/WiFi) per a un desenvolupament secundari convenient. | |
| Modes de protecció | Parada d'emergència suau, alarma de baixa tensió, alarma de sobretemperatura. |
| 2. Control de moviment |
| Adopta un sensor inercial de grau industrial; resolució de l'acceleròmetre de fins a 0,09 mg, resolució del giroscopi de fins a 0,004 °/s. |
| Freqüència de control del bus de comunicació: 1 kHz. |
| Proporciona una marxa estable i ràpida |
| Admet la marxa, incloent-hi pujar escales, pendents i gatejar; pendent màxim de pujada: 40° (segons el material del pendent); alçada màxima contínua de l'escala: 15 cm; adaptable a carreteres de formigó, carreteres de grava, etc. |
| Càrrega útil contínua per caminar: fins a 4,5 kg. |
| Admet passos in situ, translació endavant/enrere/esquerra/dreta i rotació esquerra/dreta. |
| Ofereix diverses accions de demostració: salt endavant, salt giratori, moonwalk, etc.; distància màxima de salt endavant: 50 cm. |
| Suporta el desenvolupament d'altres moviments i marxes d'alt rendiment |
| 3. Percepció intel·ligent |
| Càmera gran angular*1: camp de visió horitzontal 130°; 1920×1080 a 30 fps; antireflexos, sense distorsions; admet el reconeixement del cos humà i el desenvolupament d'algoritmes de seguiment. |
| Radars ultrasònics*2: suporten la detecció de distància i el desenvolupament d'algoritmes d'aturada d'obstacles. |
| Equipat amb sistema de prevenció d'obstacles frontal i posterior. |
| 4. Desenvolupament secundari |
| Proporciona un model de robot, un SDK i una API de moviment, una demostració de desenvolupament de moviment i manuals detallats de desenvolupament secundari. |
| Proporciona interfícies de programari de desenvolupament de percepcions amb manuals d'usuari i desenvolupament detallats; sistema ROS integrat per a un desenvolupament secundari ràpid. |
Introducció de l'empresa
El 2008, es va establir a Pequín Beijing Hewei Yongtai Technology Co., LTD. Centrada en el desenvolupament i l'operació d'equips de seguretat especials, serveix principalment a la llei de seguretat pública, la policia armada, l'exèrcit, la duana i altres departaments de seguretat nacional.
El 2010, es va establir a Guannan Jiangsu Hewei Police Equipment Manufacturing Co., LTD. Amb una superfície de 9.000 metres quadrats de taller i edifici d'oficines, el seu objectiu és construir una base de recerca i desenvolupament d'equips de seguretat especials de primera classe a la Xina.
El 2015, es va establir un centre de recerca i desenvolupament militar-policial a Shenzhen. Centrat en el desenvolupament d'equips de seguretat especials, ha desenvolupat més de 200 tipus d'equips de seguretat professionals.






Exposicions a l'estranger


Certificats
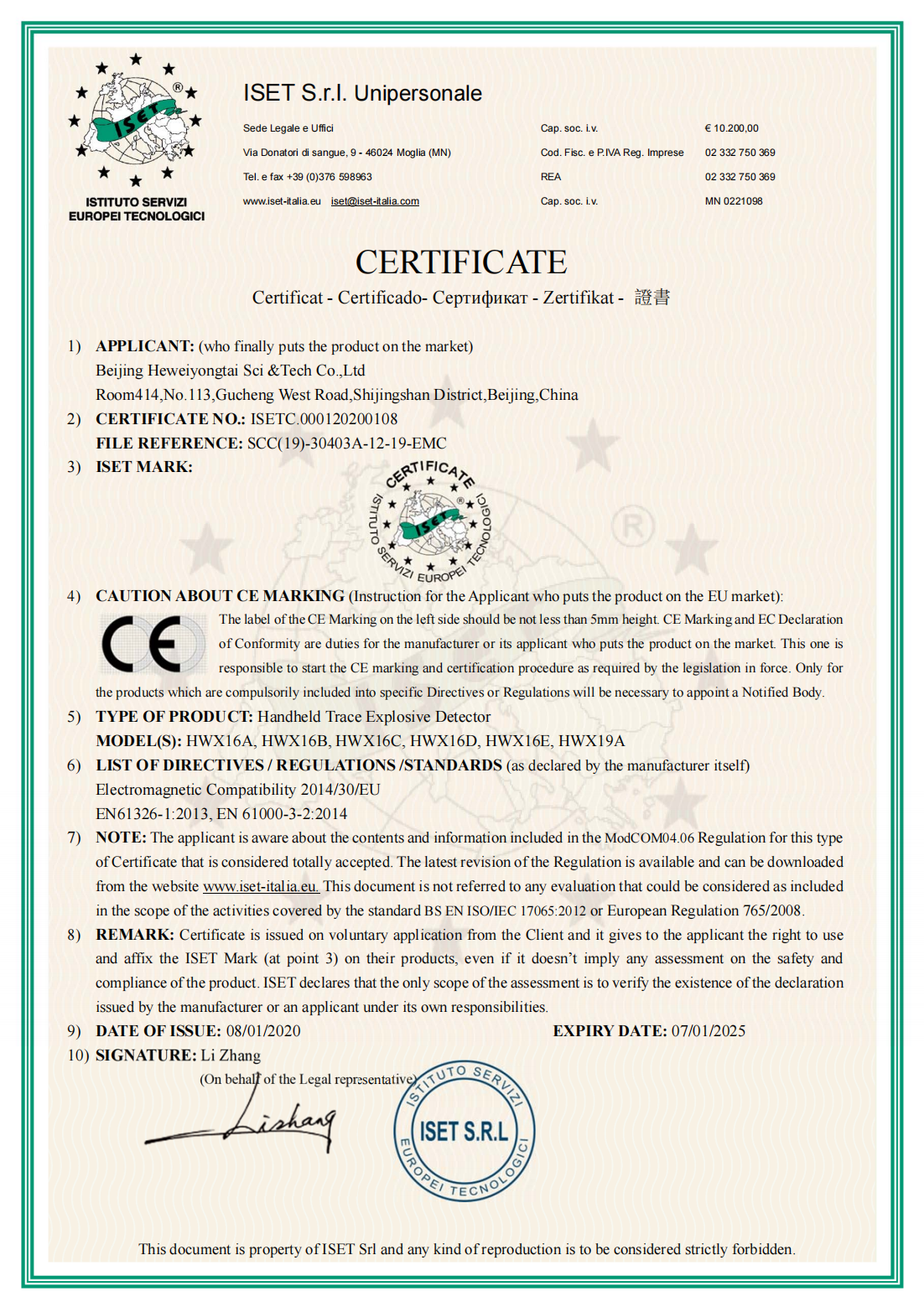

Beijing Heweiyongtai Sci & Tech Co., Ltd. és un proveïdor líder de solucions EOD i de seguretat. El nostre personal està format per professionals tècnics i directius qualificats per oferir-vos un servei satisfactori.
Tots els productes tenen informes de proves de nivell professional nacional i certificats d'autorització, així que podeu estar segurs de demanar els nostres productes.
Control de qualitat estricte per garantir una llarga vida útil del producte i que l'operador treballi amb seguretat.
Amb més de 10 anys d'experiència en la indústria per a EOD, equips antiterroristes, dispositius d'intel·ligència, etc.
Hem atès professionalment més de 60 països a clients d'arreu del món.
No hi ha MOQ per a la majoria d'articles, lliurament ràpid per a articles personalitzats.




